I actually read all of these over the course of February, but I think I can cover them in one post.
This series is basically the story of civil rights in the US from the perspective of John Lewis. The story is framed by his interactions with President Obama as Obama is inaugurated.
I’m gonna say something a little heretical about these books. Although they’re 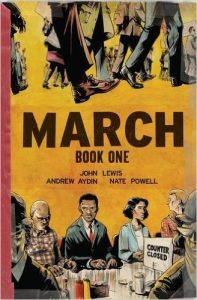 excellent, for me they were somewhat victims of their hype. As a graphic way to tell John Lewis’ version of events, they were quite good, but at times, the story felt mildly disjointed. Some of this is, I presume, because the subject matter is just John Lewis recollecting things. But, I would’ve liked to see it organized in a way that carried the emotional arc more. I know this is asking a lot of a memoir, but compare it to, for example, Maus by Spiegelman. The latter is also a true story, and also a memoir of sorts, but every moment seems to be there for a reason.
excellent, for me they were somewhat victims of their hype. As a graphic way to tell John Lewis’ version of events, they were quite good, but at times, the story felt mildly disjointed. Some of this is, I presume, because the subject matter is just John Lewis recollecting things. But, I would’ve liked to see it organized in a way that carried the emotional arc more. I know this is asking a lot of a memoir, but compare it to, for example, Maus by Spiegelman. The latter is also a true story, and also a memoir of sorts, but every moment seems to be there for a reason.
One way in which the books are similar, yet different, is the use of framing devices. In Maus, it’s the son of the Shoah survivor’s attempt to make sense of himself and his relationship to his parents. I found it very strong, in part because it’s non-obvious – the father and son spend most of their time together fighting. It results in a beautifully nuanced character. The framing device in March is a bit more obvious and sentimental, and it’s not clear to me what it adds artistically.
That said, it’s still a fine series, and a great addition to your graphic novel collection. For me, it was kind of like Persepolis – great stuff, but it was missing that deeper note that the author seemed capable of.
March, books 1, 2, and 3 (Lewis)
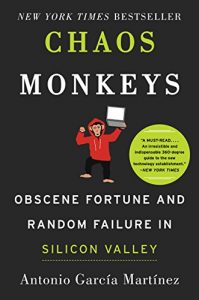 By his own admission, he’s somewhat playing a character as he recounts his days in the Silicon Valley startup seen, and later at Facebook. This is a sort of tell-all book of gossip, but it’s made enjoyable by the fact that Martinez is (openly) attempting to be Michael Lewis. The writing is quite good, and Martinez makes a point of showing off his liberal arts education, in a way that almost reminded me of Nabokov.
By his own admission, he’s somewhat playing a character as he recounts his days in the Silicon Valley startup seen, and later at Facebook. This is a sort of tell-all book of gossip, but it’s made enjoyable by the fact that Martinez is (openly) attempting to be Michael Lewis. The writing is quite good, and Martinez makes a point of showing off his liberal arts education, in a way that almost reminded me of Nabokov.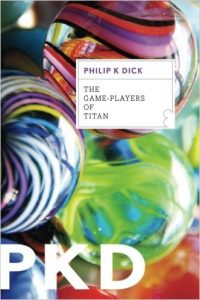 there are strands of pure beauty here and there. But, somehow nothing seems to come together in this book. It feels very rushed and slipshod. The universe of the book really doesn’t make a lot of sense. And, just in terms of showmanship, the game that the Game-Players of Titan play appears to be some variant on The Game of Life. I mean, if you’re going to have an alien game be a major plot element, at least make it cool, no?
there are strands of pure beauty here and there. But, somehow nothing seems to come together in this book. It feels very rushed and slipshod. The universe of the book really doesn’t make a lot of sense. And, just in terms of showmanship, the game that the Game-Players of Titan play appears to be some variant on The Game of Life. I mean, if you’re going to have an alien game be a major plot element, at least make it cool, no? stories. I’m not sure I’m an objective judge of quality here because of this, but MAN did I enjoy this book. It’s the story of an author who helps find a lost city in Honduras. Amazingly, this was done in 2015, thanks to LIDAR technology able to locate human-made structures in deep jungle. Of course, no modern jungle adventure can match the danger and intrigue of the old 19th century tales, but this is about as good as it gets in modern times.
stories. I’m not sure I’m an objective judge of quality here because of this, but MAN did I enjoy this book. It’s the story of an author who helps find a lost city in Honduras. Amazingly, this was done in 2015, thanks to LIDAR technology able to locate human-made structures in deep jungle. Of course, no modern jungle adventure can match the danger and intrigue of the old 19th century tales, but this is about as good as it gets in modern times. in the City should be. The characters are beautifully crafted and the story is wonderful. Ulinich also does an excellent job of using the vehicle of comics to create the story.
in the City should be. The characters are beautifully crafted and the story is wonderful. Ulinich also does an excellent job of using the vehicle of comics to create the story. how making poor choices early on can be very dangerous. The author does a great job of melding data with case studies and stories.
how making poor choices early on can be very dangerous. The author does a great job of melding data with case studies and stories. conceptual errors. I especially enjoy how pretty much nobody is spared, from politicians to famous scholars, to beloved intellectuals like Steve Levitt of “Freakonomics” fame.
conceptual errors. I especially enjoy how pretty much nobody is spared, from politicians to famous scholars, to beloved intellectuals like Steve Levitt of “Freakonomics” fame. The author makes a compelling that the role of these drugs (which were used en masse during the Battle of France) has been underestimated. Similarly, the fact that Hitler had a personal physician who prescribed him all manner of drugs, up to and including speedballs, may have also been overlooked as an explanation of erratic behavior.
The author makes a compelling that the role of these drugs (which were used en masse during the Battle of France) has been underestimated. Similarly, the fact that Hitler had a personal physician who prescribed him all manner of drugs, up to and including speedballs, may have also been overlooked as an explanation of erratic behavior. elements that make Dick amazing are there, but… somehow it just doesn’t seem to coalesce. Almost all Dick novels follow a pattern, in which a number of small stories are set up in a very strange future reality. The stories are advanced as they bounce against each other, ultimately coming to some sort of resolution. When this works (as in Dr. Bloodmoney, Do Androids Dream of Electric Sheep?, and The Man in the High Castle) it’s magnificent. It’s that part of Mozart’s 40th where suddenly all the melodies intertwine and change.
elements that make Dick amazing are there, but… somehow it just doesn’t seem to coalesce. Almost all Dick novels follow a pattern, in which a number of small stories are set up in a very strange future reality. The stories are advanced as they bounce against each other, ultimately coming to some sort of resolution. When this works (as in Dr. Bloodmoney, Do Androids Dream of Electric Sheep?, and The Man in the High Castle) it’s magnificent. It’s that part of Mozart’s 40th where suddenly all the melodies intertwine and change. reminds me “In Defense of Flogging” by Moskos, in the sense that the author isn’t exactly in favor the what the title claims, but nevertheless argues that our current alternative is even worse.
reminds me “In Defense of Flogging” by Moskos, in the sense that the author isn’t exactly in favor the what the title claims, but nevertheless argues that our current alternative is even worse.